
La conducción en convoy – o vehicle platooning – lleva tiempo posicionándose como una de las estrategias más prometedoras para mejorar la eficiencia del transporte por carretera. La idea es simple pero potente: vehículos que circulan en convoy, a distancias reducidas y con movimientos sincronizados, capaces de disminuir la resistencia aerodinámica, reducir el consumo de combustible y aumentar la capacidad efectiva de la vía.
En condiciones controladas, un vehículo que sigue a otro a unos 25 metros y 80 km/h puede experimentar reducciones de arrastre de hasta el 30%, con beneficios acumulativos en cadenas más largas. Sin embargo, todo ese potencial depende de un elemento crítico: la comunicación entre vehículos o comunicación V2V. Sin un intercambio de información fiable, rápido y continuo, el convoy pierde estabilidad y, con ella, buena parte de sus ventajas.
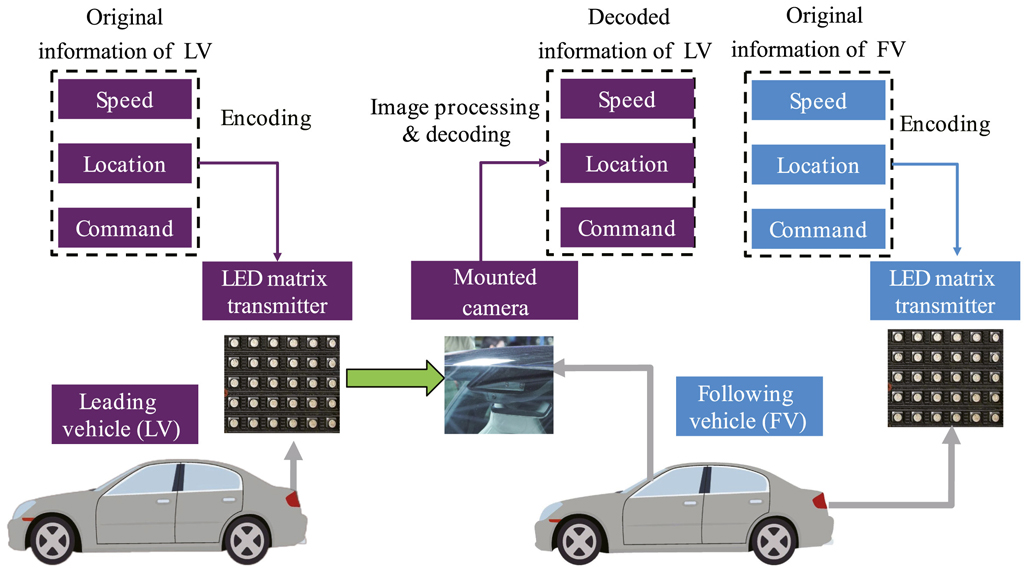
Un reciente desarrollo propone un giro relevante en cómo abordar el problema del V2V. Frente a la dependencia de redes inalámbricas, infraestructura y espectro radioeléctrico, los investigadores plantean un sistema que utiliza un componente ya presente en cualquier vehículo: la luz trasera. Mediante una matriz de LED capaz de codificar información y una cámara convencional en el vehículo seguidor que la interpreta, el sistema convierte la señalización luminosa en un canal de comunicación autónomo.
Una alternativa a las limitaciones del V2V convencional
Las tecnologías que han sustentado hasta ahora el desarrollo del V2V, como DSRC (Dedicated Short-Range Communications) o C-V2X (Cellular Vehicle-to-Everything), han permitido avances importantes, pero siguen arrastrando limitaciones estructurales. Su despliegue a gran escala implica inversiones en infraestructura, dependencia de unidades en carretera y exposición a problemas bien conocidos en entornos inalámbricos: interferencias, latencias, saturación del espectro o vulnerabilidades frente a ataques como la denegación de servicio o la suplantación de señales. Incluso en condiciones normales de tráfico denso, la calidad del enlace puede degradarse de forma significativa.
Las alternativas basadas en luz visible tampoco han resuelto completamente el problema. Aunque el VLC (Visible Light Communication) evita el uso del espectro radioeléctrico, su implementación tradicional depende de fotodetectores específicos y presenta dificultades para mantener transmisiones estables en exteriores, especialmente bajo luz solar intensa. A esto se suma la necesidad de evitar el parpadeo perceptible y el incremento de costes asociados a hardware dedicado.
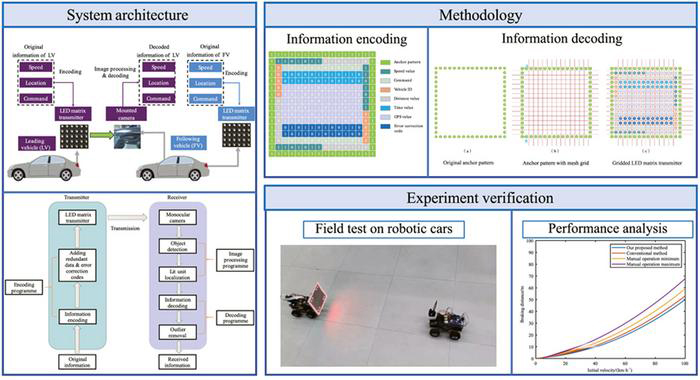
Para superar estas limitaciones, los investigadores han desarrollado un método de comunicación innovador, basado en visión artificial e independiente de cualquier infraestructura, que reutiliza la luz trasera del vehículo líder como un transmisor en forma de matriz LED. En este sistema, la información se codifica mediante la activación selectiva de distintos elementos de la matriz, mientras que los vehículos que circulan detrás capturan y decodifican la señal utilizando una cámara monocular convencional.
Gracias a algoritmos avanzados de detección de objetos y de localización de las unidades iluminadas, el sistema es capaz de extraer los mensajes de forma fiable sin necesidad de conexión a red ni de incorporar hardware adicional más allá de los propios componentes del vehículo. Este planteamiento no solo elimina la dependencia de unidades en carretera o fotodetectores específicos, sino que además aprovecha las ventajas inherentes de la luz visible: inmunidad a las interferencias electromagnéticas, ausencia de consumo de espectro radioeléctrico y una transmisión naturalmente direccional que reduce los dominios de colisión y limita la interferencia frente a los sistemas basados en radiofrecuencia.
Validación experimental y potencial de aplicación
El sistema ha sido validado tanto en simulación como en pruebas reales utilizando vehículos robóticos a escala controlados mediante plataformas como Raspberry Pi. Estos ensayos han permitido evaluar el comportamiento del enlace en condiciones variables, analizando aspectos como la estabilidad de la transmisión, la latencia en la decodificación y la fiabilidad en ausencia total de red.
Los resultados muestran que el sistema es capaz de mantener una comunicación precisa y consistente incluso en escenarios donde las tecnologías convencionales no pueden operar, como entornos sin cobertura o situaciones de fallo de red. Esta capacidad de funcionar de forma autónoma refuerza su interés como canal complementario en aplicaciones críticas, donde la redundancia de sistemas es un requisito fundamental.
De cara a su evolución, esta solución V2V independiente de la red se perfila como un canal complementario —e incluso de respaldo— a las tecnologías actuales, especialmente en entornos donde las comunicaciones convencionales presentan limitaciones. Su bajo umbral de integración podría facilitar la transición de vehículos tradicionales hacia niveles de autonomía parcial, al habilitar funciones de platooning con intervenciones mínimas sobre la arquitectura existente.
A partir de aquí, las líneas de desarrollo pasan por incorporar cámaras de mayor resolución que amplíen el alcance efectivo del sistema, implementar esquemas de codificación adaptativa capaces de compensar variaciones ambientales —como condiciones meteorológicas o cambios en la iluminación— y extender el modelo a cadenas más largas de vehículos o a aplicaciones más amplias dentro del ecosistema IoT del transporte. La integración con sistemas autónomos en desarrollo permitiría, además, afinar la dinámica del convoy y consolidar mejoras acumulativas tanto en eficiencia operativa como en seguridad.
Puede acceder al paper completo de la investigación a través del siguiente enlace:
https://www.sciencedirect.com/science/article/pii/S2773153725000283
Portada: Imagen de recurso generada por IA que no pertenece a la investigación
