La pinza robótica con dedos suaves y sensibles desarrollados en MIT puede manejar cables con una destreza sin precedentes.
Para los humanos, puede ser un desafío manipular objetos delgados y flexibles como cuerdas, alambres o cables. Pero si estos problemas son difíciles para los humanos, son casi imposibles para los robots. A medida que un cable se desliza entre los dedos, su forma cambia constantemente y los dedos del robot deben detectar y ajustar constantemente la posición y el movimiento del cable.
Los enfoques estándar han utilizado una serie de deformaciones lentas e incrementales, así como accesorios mecánicos, para hacer el trabajo. Recientemente, un grupo de investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT y del Departamento de Ingeniería Mecánica del MIT realizaron la tarea desde un ángulo diferente, de una manera que nos imita más de cerca a los humanos. El nuevo sistema del equipo utiliza un par de pinzas robóticas suaves con sensores táctiles de alta resolución (y sin restricciones mecánicas adicionales) para manipular con éxito los cables que se mueven libremente.
Uno podría imaginar el uso de un sistema como este para tareas industriales y domésticas, que algún día permita que los robots nos ayuden con cosas como atar nudos, dar forma a los cables o incluso suturas quirúrgicas.
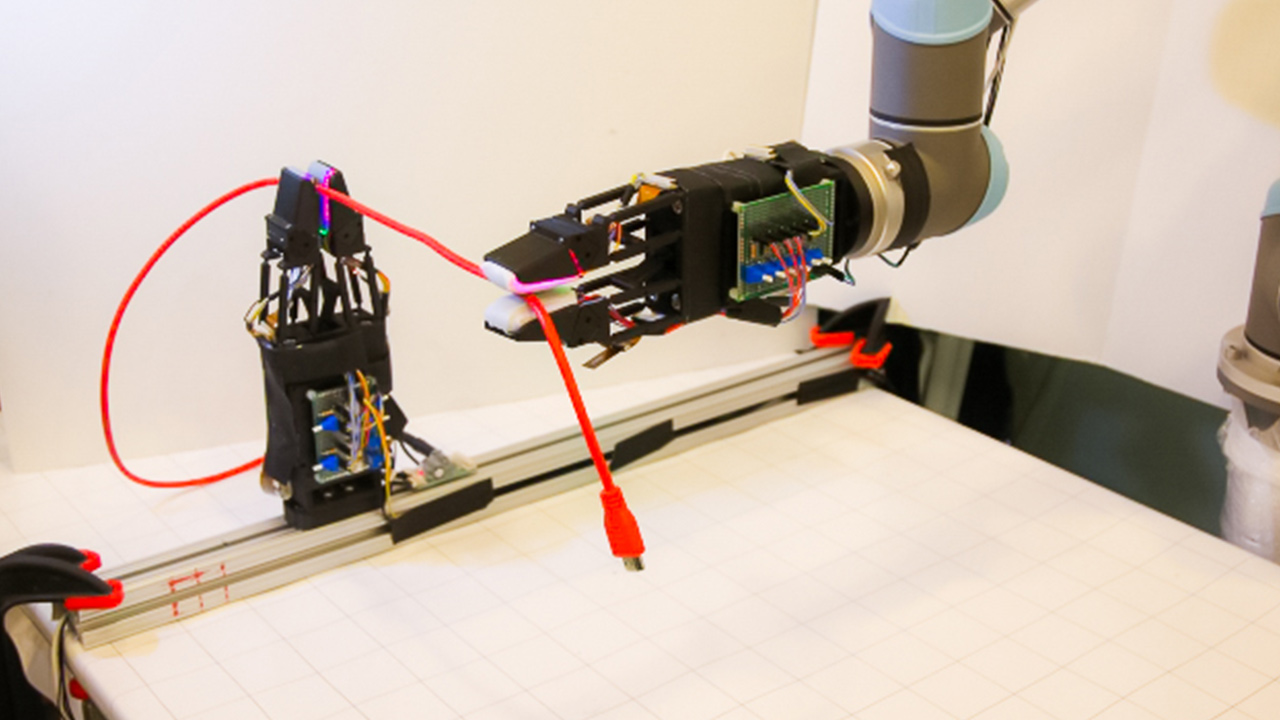
El primer paso del equipo fue construir una nueva pinza de dos dedos. Los dedos opuestos son ligeros y de movimiento rápido, lo que permite ajustes ágiles y en tiempo real de la fuerza y la posición. En la punta de los dedos hay sensores basados en visión «GelSight», construidos con goma suave con cámaras integradas. La pinza está montada en un brazo robótico, que puede moverse como parte del sistema de control.
El segundo paso del equipo fue crear un marco de percepción y control para permitir la manipulación del cable. Para la percepción, utilizaron los sensores GelSight para estimar la postura del cable entre los dedos y para medir las fuerzas de fricción a medida que el cable se desliza. Dos controladores funcionan en paralelo: uno modula la fuerza de agarre, mientras que el otro ajusta la posición de la pinza para mantener el cable dentro de la pinza.
Cuando se monta en el brazo, la pinza podría seguir de manera confiable un cable USB a partir de una posición de agarre aleatoria. Luego, en combinación con una segunda pinza, el robot puede mover el cable «mano sobre mano» (como lo haría un humano) para encontrar el extremo del cable. También podría adaptarse a cables de diferentes materiales y grosores.
Como una demostración más de su destreza, el robot realizó una acción que los humanos realizan habitualmente al enchufar los auriculares en un teléfono celular. Comenzando con un cable de auriculares que flota libremente, el robot pudo deslizar el cable entre sus dedos, detenerse cuando sintió que el enchufe tocaba sus dedos, ajustar la postura del enchufe y finalmente insertar el enchufe en el conector.
«La manipulación de objetos blandos es muy común en nuestra vida cotidiana, como la manipulación de cables, el plegado de tela y el anudado de cuerdas», dice Yu She, postdoctorado del MIT y autor principal de un nuevo documento sobre el sistema. «En muchos casos, nos gustaría que los robots ayuden a los humanos a hacer este tipo de trabajo, especialmente cuando las tareas son repetitivas, aburridas o inseguras».
Retenme mucho
El seguimiento de cables es desafiante por dos razones. Primero, requiere controlar la «fuerza de agarre» (para permitir un deslizamiento suave) y la «pose de agarre» (para evitar que el cable caiga de los dedos de la pinza).
Esta información es difícil de capturar de los sistemas de visión convencionales durante la manipulación continua, porque generalmente está ocluida, es costosa de interpretar y, a veces, es inexacta.
Además, esta información no se puede observar directamente con solo sensores de visión, de ahí el uso del equipo de sensores táctiles. Las articulaciones de la pinza también son flexibles, protegiéndolas del posible impacto.
Los algoritmos también se pueden generalizar a diferentes cables con varias propiedades físicas como material, rigidez y diámetro, y también a aquellos a diferentes velocidades.
Al comparar diferentes controladores aplicados a la pinza del equipo, su política de control podría retener el cable en la mano por distancias más largas que otras tres. Por ejemplo, el controlador de «circuito abierto» solo siguió el 36 por ciento de la longitud total, la pinza perdió fácilmente el cable cuando se curvó, y necesitó muchos reagrupamientos para terminar la tarea.
Mirando hacia el futuro
El equipo observó que era difícil tirar del cable hacia atrás cuando alcanzaba el borde del dedo, debido a la superficie convexa del sensor GelSight. Por lo tanto, esperan mejorar la forma del sensor de dedo para mejorar el rendimiento general.
En el futuro, planean estudiar tareas de manipulación de cables más complejas, como el enrutamiento de cables y la inserción de cables a través de obstáculos, y eventualmente desean explorar tareas de manipulación de cables autónomas en la industria automotriz.
Yu Ella escribió el artículo junto a los estudiantes de doctorado del MIT Shaoxiong Wang, Siyuan Dong y Neha Sunil; Alberto Rodríguez, profesor asociado de ingeniería mecánica del MIT; y Edward Adelson, profesor de John y Dorothy Wilson en el Departamento de Ciencias del Cerebro y Cognitivas del MIT.
Este trabajo fue apoyado por los Premios de Investigación de Amazon, el Instituto de Investigación de Toyota y la Oficina de Investigación Naval.
Créditos de imagen: MIT CSAIL.
