
Un aspecto fascinante de los bancos de peces es su movimiento, con sus comportamientos complejos y sincronizados que les ayudan a encontrar alimento, migrar o evitar a los depredadores. Ningún pez, o grupo de peces, es el encargado de coordinar estos movimientos sino que surgen por una coordinación implícita donde los peces toman decisiones individuales basadas en lo que ven hacer a sus vecinos. Este tipo de autoorganización y coordinación descentralizada y autónoma ha fascinado durante mucho tiempo a los científicos, especialmente en el campo de la robótica.
Ahora, un equipo de investigadores de la Universidad de Harvard, en particular de la Escuela de Ingeniería y Ciencias Aplicadas John A. Paulson (SEAS) y el Wyss Institute, han logrado desarrollar robots inspirados en estos bancos de peces que pueden sincronizar sus movimientos sin ningún tipo de control externo. Para ello desarrollaron un sistema de coordinación basado en la visión utilizando cámaras y luces LED azules. La investigación fue publicada recientemente en “Science Robotics”.
“Los robots a menudo están pensados para su despliegue en áreas que son inaccesibles o peligrosas para los seres humanos, áreas donde la intervención humana ni siquiera podría ser posible. En estas situaciones, sería ideal tener un conjunto de robots altamente autónomos que sea autosuficiente. Mediante el uso de reglas implícitas y la percepción visual 3D, pudimos crear un sistema que tiene un alto grado de autonomía y flexibilidad bajo el agua donde el GPS y WiFi no son accesibles” explica Florian Berlinger, candidato a doctorado en SEAS y Wyss y primer autor del PAPER.
Este “enjambre” de robots inspirado en los bancos de peces, llamado Blueswarn, fue creado n el laboratorio de Radhika Nagpal, profesor Fred Kavli de Ciencias de la Computación en SEAS y miembro asociado de la facultad en el Instituto Wyss. El laboratorio de Nagpal es pionero en sistemas autoorganizados, desde su “enjambre” de 1.000 robots Kilobot hasta su equipo de construcción robótica inspirado en termitas. Sin embargo, la mayoría de estos enjambres robóticos operaban en el espacio bidimensional. Los espacios tridimensionales, como el aire y el agua, plantean desafíos significativos para la detección y la locomoción.
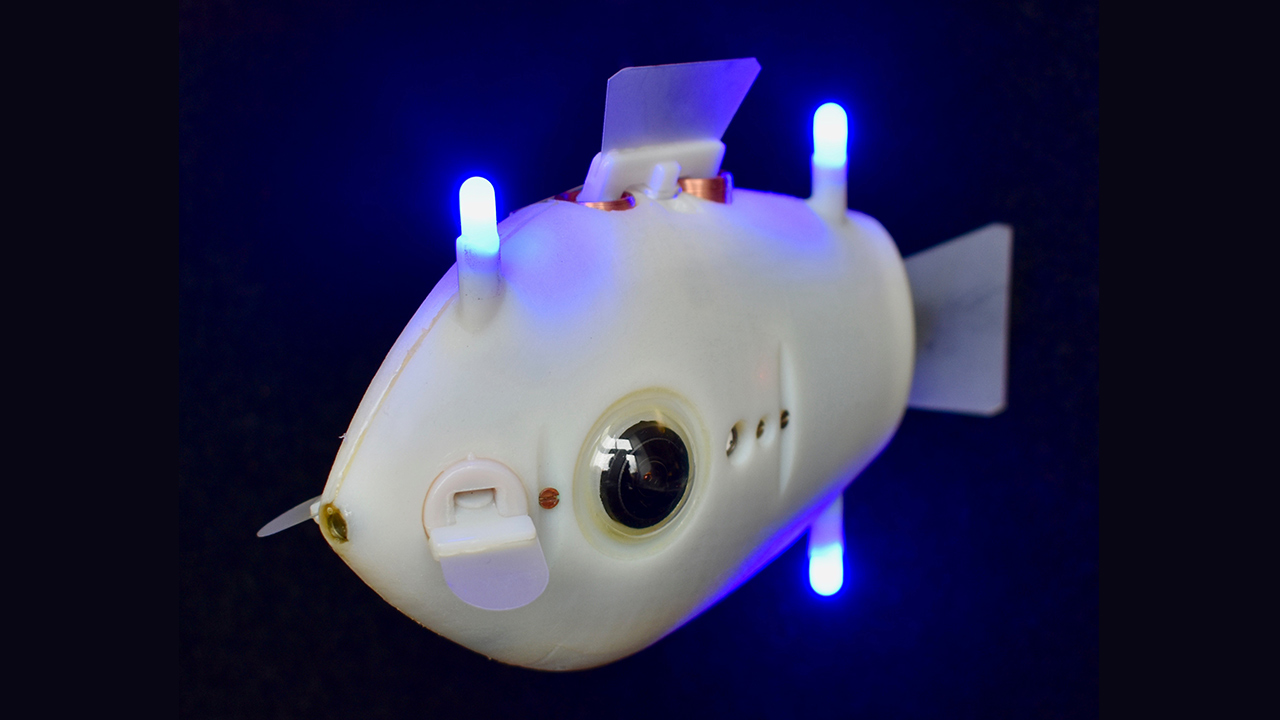
Para superar estos desafíos, los investigadores desarrollaron un sistema de coordinación basado en la visión con la incorporación de luces LED azules. Cada robot submarino, llamado Bluebot, está equipado con dos cámaras y tres luces LED. Las cámaras son capaces de detectar los LED de los Bluebot vecinos y utilizan un algoritmo personalizado para determinar su distancia, dirección y rumbo. Basándose en la simple producción y detección de la luz LED, los investigadores demostraron que el conjunto de robots podía exhibir complejos autoorganizados, incluyendo la agregación, dispersión y formación de círculos.
“Cada Bluebot reacciona implícitamente a las posiciones de sus vecinos. Así que, si queremos que los robots se sumen, cada Bluebot se calcula la posición de cada uno de sus vecinos y se moverá hacia el centro. Si queremos que se dispersen, los Bluebots hacen lo contrario. Si queremos que naden como un banco en círculos, están programados para seguir las luces que están directamente delante de ellos en el sentido de las agujas de reloj”, explica Berlinger.
Los investigadores también simularon una misión de búsqueda simple con una luz roja en el tanque. Utilizando el algoritmo de dispersión, los Bluebots se extienden por todo el tanque hasta que uno se acerca lo suficiente a la fuente de luz para detectarlo. Una vez que el robot detecta la luz, sus LED comienzan a parpadear, lo que activa el algoritmo de agregación en el resto de la escuela. A partir de ahí, todos los Bluebots se agregan alrededor del robot de señalización.
«Nuestros resultados con Blueswarm representan un hito significativo en la investigación de comportamientos colectivos autoorganizados submarinos. Los conocimientos de esta investigación nos ayudarán a desarrollar futuros enjambres submarinos en miniatura que puedan realizar monitoreo y búsqueda ambiental en entornos visualmente ricos pero frágiles como arrecifes de coral. Esta investigación también allana una manera de entender mejor los bancos de peces, recreando sintéticamente su comportamiento”, concluye Nagpal.
Créditos de imagen: Self-organizing Systems Research Group
